| Home | Contents | Start | Prev | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | Next |
Status
A temporary status page that details where I have got to as life tends to pull me away from this project on a fairly regular basis.
update 14-07-2023We are operational again. Now it is time to integrate radio control to control camera and we are ready to photograph grass (all over again).
Completed
- Raspberry Barrel completed. Sonars tested and ok.
- Basic locomotion using radio control working. All 4 channels ok.
- Mount base for Raspberry Barrel.
- Check that wireless telemetry is operational.
- Look at the Raspberry Pi Camera code.
- Adjust camera angle in the raspberry barrel.
- Clone monana pi and get maui running again.
- Integrate Camera code with Arduino.
- Integrate raspberry barrel to see if I can collect more photos.
Note: Telemetry works fine at 9600 baud over the XBees. I cannot upload sketched over the link but I'm not sure this was the case before. I am not going to get sidetracked with that just now.
My TODO List
- Integrate and/or test sonars (at least display measurements).
- Investigate, wire-in and test compass.
- Reconfigure Xbees to work at 57600 baud (eventually).
Not all the sensors will be intergated but at least they will be wired in and operational (with exception of the bump sensors). At this stage, everything will be manual driving without automation.
When the sensor barrel is operational, I need to take it out to capture some more images of grass. I suspect the images will not be like those taken previously as the camera will be mounted at a different height and different angle. This may mean having to go on another mass-grass (and non-grass) photographing spree and binning the previous photos. Hopefully, with radio control, I will be much better prepared this time around!
We will then look at getting back to machine learning. That will involve getting tensorflow running on the Pi. It may be necessary to shrink down the images to 32x32 (or even 16x16) before proceeding. Ideally we would want to train on the mac and run on the Pi but it may be more expedient to do everything on the Pi, even if it takes a few days to train.
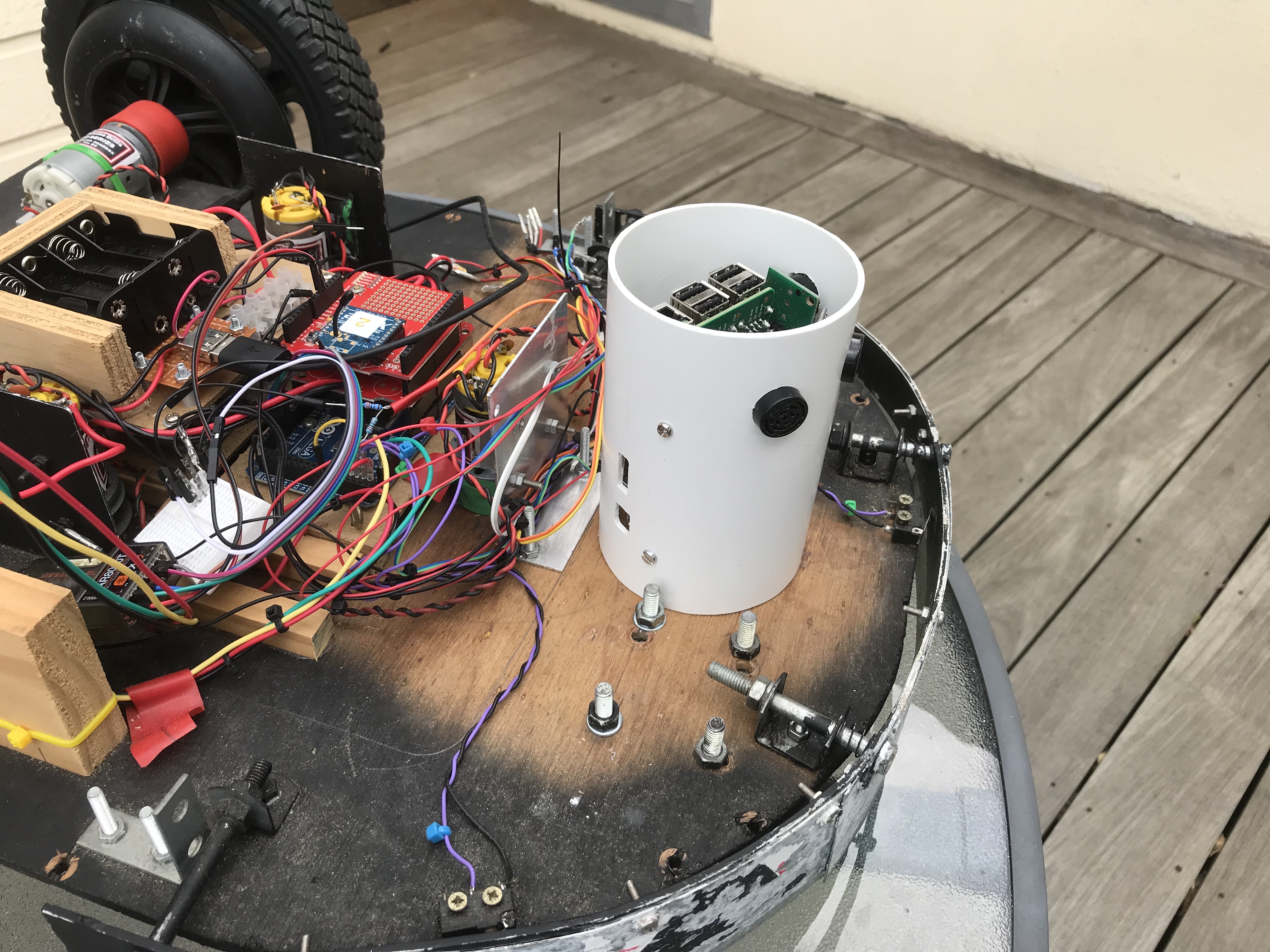
Pi in the barrel

Moana stripped of her towers
Testing placement of the barrel on Moana
July 2023
| Home | Contents | Start | Prev | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | Next |